핵심 기술
번호판으로 차량을 추적합니다
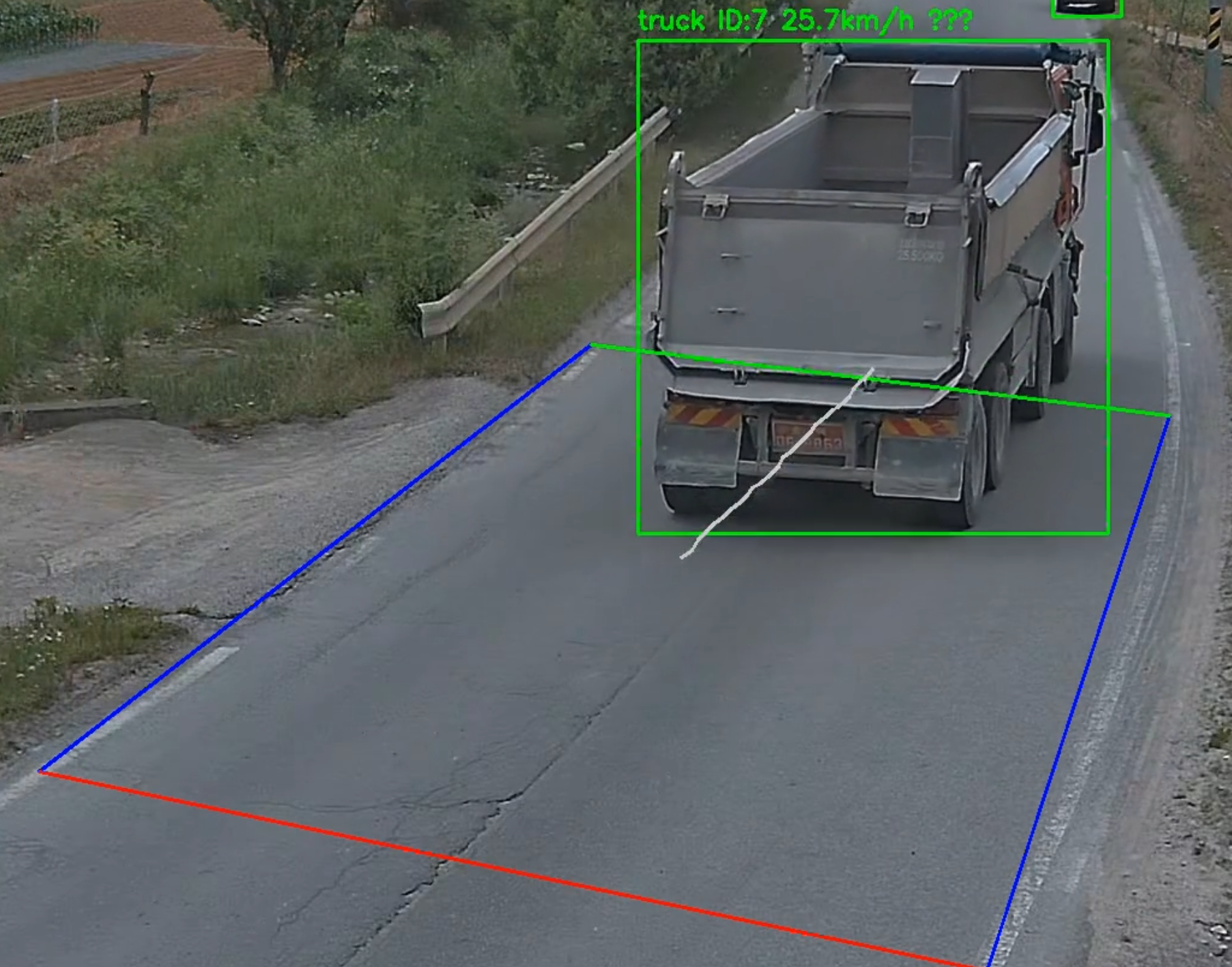
국내 과속 탐지에서 오데트만 사용하는 방식
대형 트럭이나 수목이 차량 몸체를 가리면 차량 기반 감지모델은 곧바로 대상을 잃어버립니다. 그러나 번호판은 반사 소재 특성상 빛이 부족한 환경에서도 감지가 안정적이며, 차량 몸체보다 작고 일정한 크기와 위치를 유지합니다. 오데트는 번호판을 추적 기준으로 삼아 시야가 부분적으로 가려지는 현장에서도 속도 측정의 연속성을 확보했습니다.
차량의 몸체가 아닌 번호판을 추적 기준으로 삼아, 화면에 꽉차게 찍히는 대형 트럭이나 수목이 시야를 가리는 현장에서도 안정적으로 속도 측정이 가능하도록 했습니다.
일반적인 과속 탐지 시스템은 차량 몸체를 감지한 후 추적해 속도를 추론합니다. 하지만 25톤 트럭처럼 높이가 큰 차량이나 가로수가 시야를 가리면 차량 기반 추론이 불안정해집니다. 오데트는 이 문제를 번호판을 추적 기준으로 삼아 해결했습니다.
번호판은 반사 소재 특성상 어떤 조건에서도 감지가 안정적이고, 차량 몸체보다 훨씬 일정한 크기와 형태를 유지합니다.
차별점
과속 탐지의 네 가지 핵심 난제를 오데트만의 방식으로 풀어냈습니다.
핵심 기술
국내 과속 탐지에서 오데트만 사용하는 방식
대형 트럭이나 수목이 차량 몸체를 가리면 차량 기반 감지모델은 곧바로 대상을 잃어버립니다. 그러나 번호판은 반사 소재 특성상 빛이 부족한 환경에서도 감지가 안정적이며, 차량 몸체보다 작고 일정한 크기와 위치를 유지합니다. 오데트는 번호판을 추적 기준으로 삼아 시야가 부분적으로 가려지는 현장에서도 속도 측정의 연속성을 확보했습니다.
운영 편의
기존 시스템 대비 절반 이하의 조작
대부분의 과속 탐지 시스템은 속도 측정 구간을 정의하기 위해 8~12번의 점 지정을 요구합니다. 반면 오데트는 4개의 꼭짓점만 지정하면 됩니다. 측정 구간의 실제 길이를 수치로 입력하면 속도 추론에 필요한 실제 거리가 계산되기 때문에, 추가 좌표 없이도 정확한 속도 측정이 가능합니다.
인프라 설계
NATS + MinIO로 디스크 I/O 병목을 해소
영상이 많아지면 디스크 직접 접근 방식은 I/O 블로킹으로 분석 워커가 멈추는 문제가 생깁니다. 오데트는 NATS 메시지 브로커로 분석 작업을 큐잉하고 MinIO 객체 스토리지로 영상을 관리합니다. 이 구조 덕분에 GPU 분석 워커 2개가 동시에 영상을 처리하면서도 시스템 전체가 안정적으로 유지됩니다.
추적 알고리즘
저신뢰도 감지까지 살려내는 2단계 매칭
속도 측정은 같은 차량을 여러 프레임에 걸쳐 일관된 ID로 추적해야 측정 구간의 진입·이탈 시점을 계산할 수 있습니다. 오데트는 ByteTrack을 사용합니다. ByteTrack은 고신뢰도 감지 결과로 1차 매칭을 수행한 뒤, 기존 트랙렛을 저신뢰도 감지 결과와 2차 매칭하여 일시적으로 가려진 차량도 트랙을 잃지 않습니다. 번호판처럼 작고 빠르게 움직이는 객체에도 안정적으로 동작합니다.
차량 기반
차량 몸체를 감지하고 추적해 속도를 측정하는 방식입니다. 대형 트럭이나 수목이 몸체를 가리면 추적이 끊길 수 있습니다.